
Biomedical Engineering
We apply control theoretic concepts to biomedical systems in order to enhance the understanding of the underlying mechanisms and to improve treatment strategies. Research fields are the Pituitary-Thyroid feedback loop, retinal laser therapies, as well as human motor control and rehabilitation engineering.
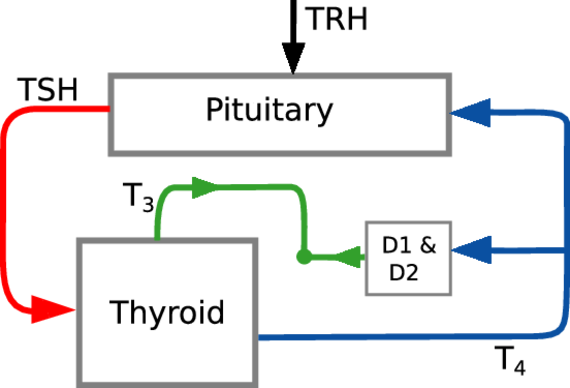
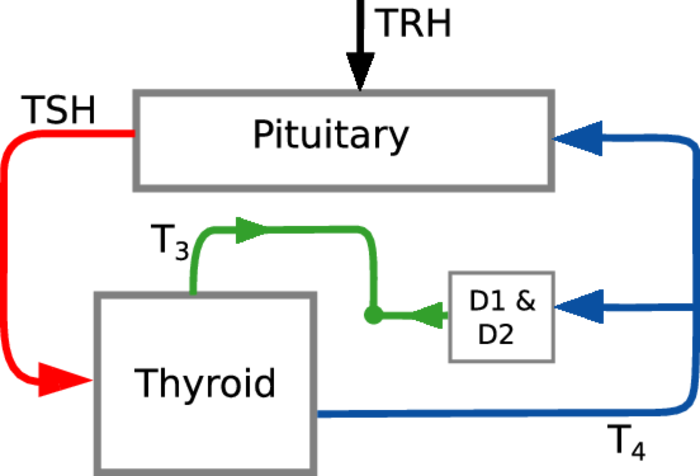
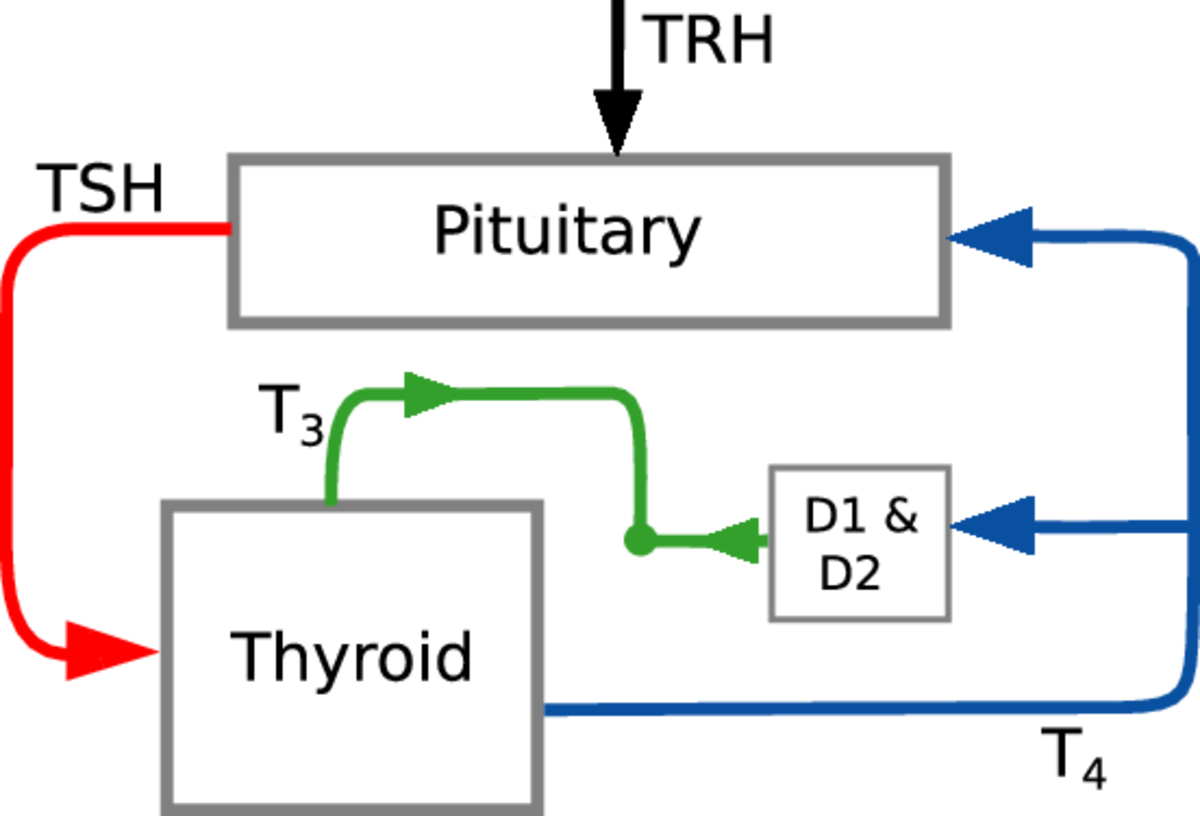
Pituitary-Thyroid feedback loop
- Modeling of hyperthyroidism/hypothyroidism
- Development of model-based control strategies to improve medication
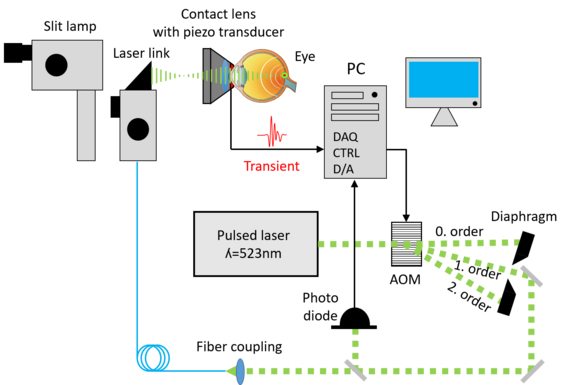
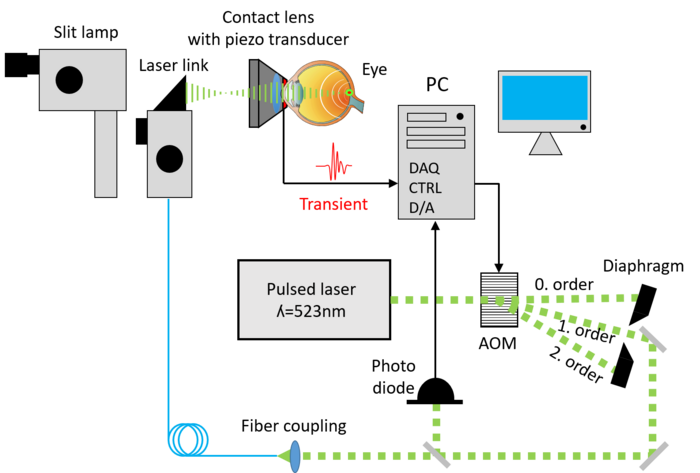
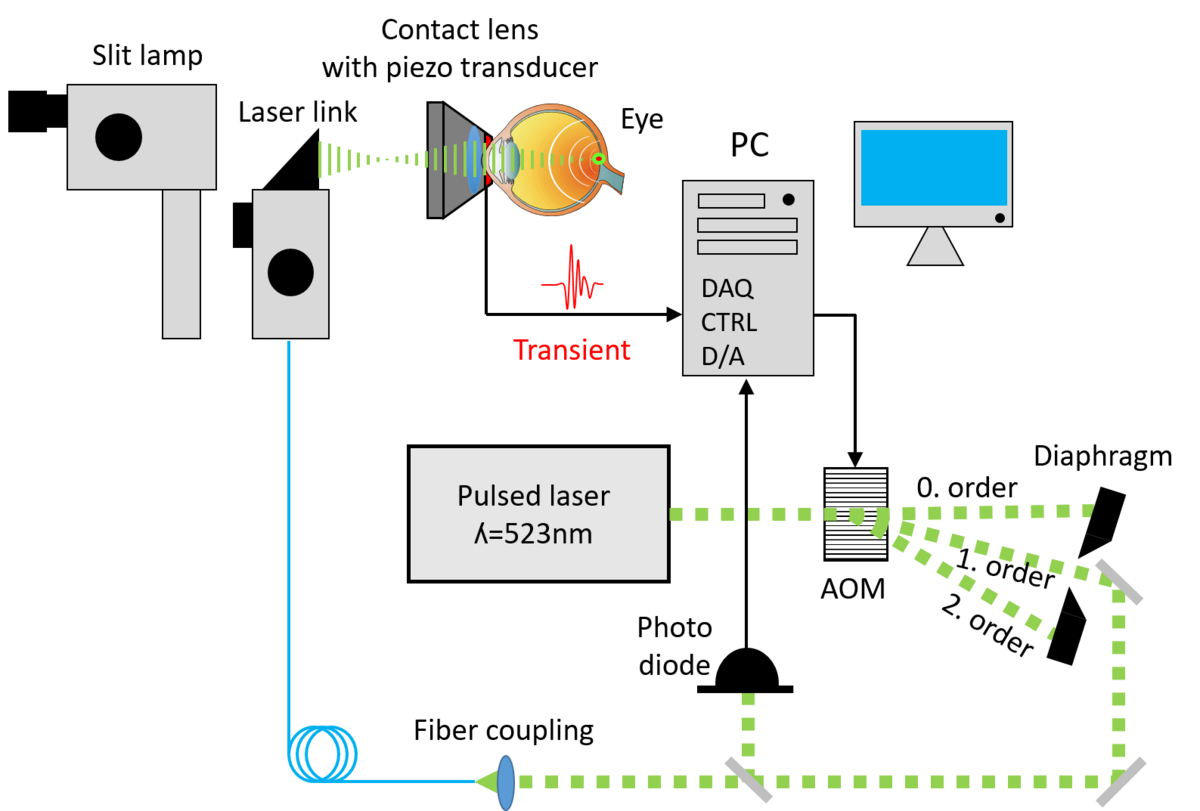
Retinal laser therapies
- Development of suitable models of heat diffusion during laser treatment
- Observer and control design for improved and more efficient treatment
 ©
IRT
©
IRT
 ©
MLL
©
MLL
Robotics
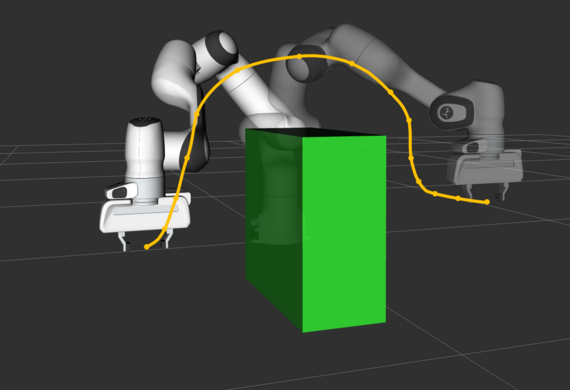
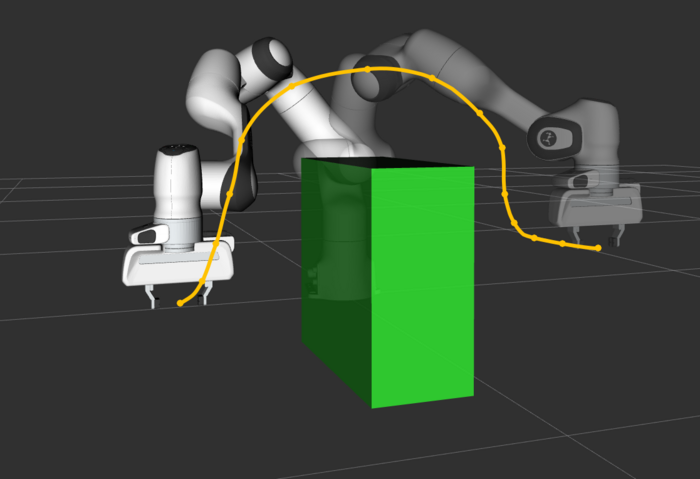
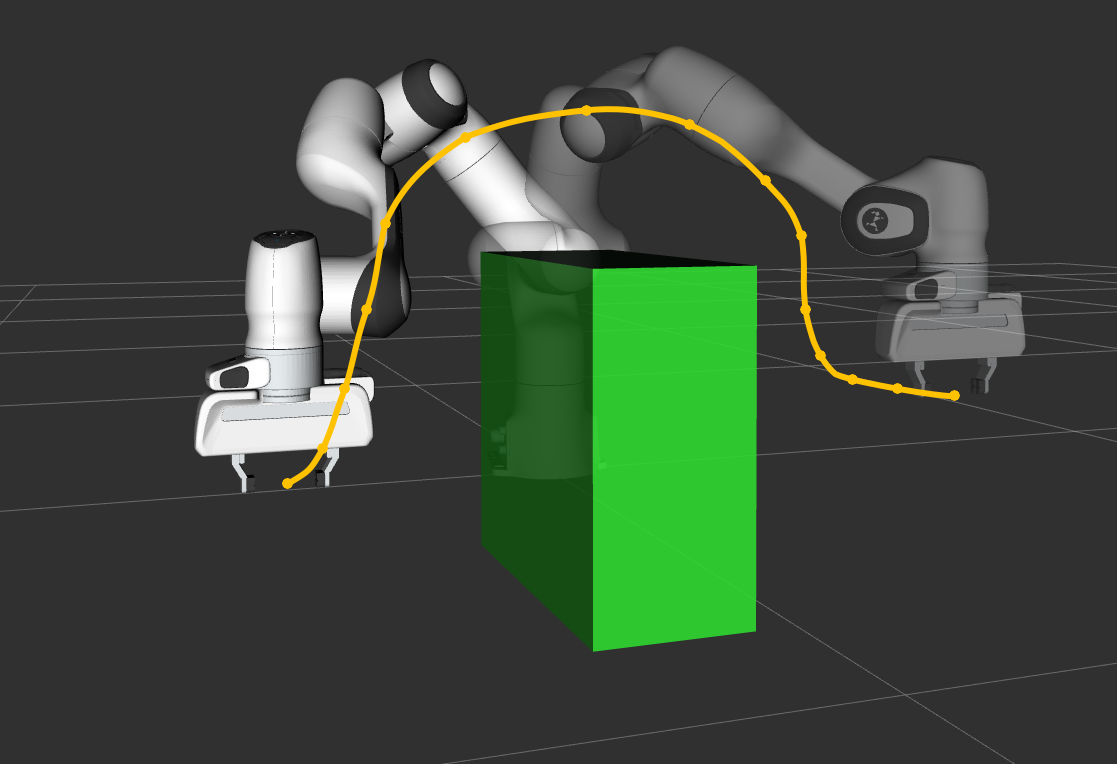
Control theory is one of the central methods required for modern robotics, which therefore represents one of the main control applications at our institute. Current research topics include real-time path planning with guaranteed collision avoidance using
- Circular Fields for obstacle avoidance
- Multi-Agent Framework for environment exploration
 ©
IRT
©
IRT
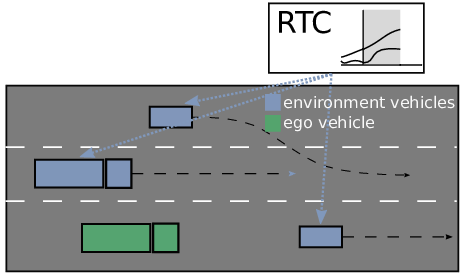
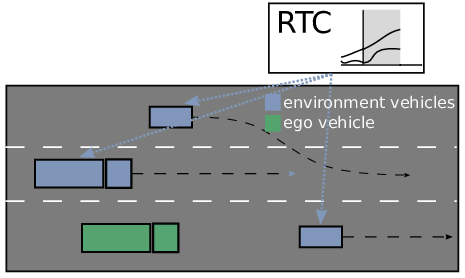
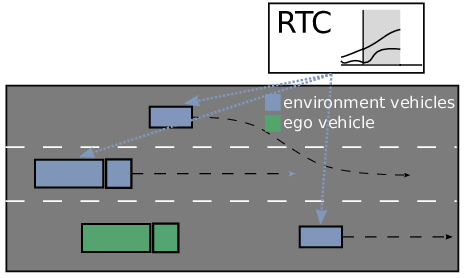
Autonomous Driving
As autonomous vehicles (AV) are coming closer road admission, suitable methods to test AVs are in rising demand. Specifically, the behavior of an AV in specific traffic situations needs to be evaluated to address safety concerns. Model predictive control (MPC) is of particular interest for this purpose as the easy incorporation of constraints and the look-ahead of MPC allows to represent different traffic scenarios. This project aims to investigate suitable MPC appraoches to emulate a reactive environment for testing AVs in different scenarios.
Selected Publications
-
(2025): Informed Circular Fields: A Global Reactive Obstacle Avoidance Framework for Robotic Manipulator, Frontiers in Robotics and AI, 2025, vol. 11
DOI: 10.3389/frobt.2024.1447351 -
(2024): Motion Planning using Reactive Circular Fields: A 2-D Analysis of Collision Avoidance and Goal Convergence, IEEE Transactions on Automatic Control, 2024, vol. 69, no. 3, pp. 1552-1567
DOI: 10.1109/TAC.2023.3303168
arXiv: 2210.16106 -
(2024): Predictive Operation of Multi-Energy Systems in Sequential Markets: A Case Study, 2024 European Control Conference (ECC), Stockholm, Sweden. pp. 1509-1515
DOI: 10.23919/ECC64448.2024.10591115 -
(2022): Mathematical Modeling and Simulation of Thyroid Homeostasis: Implications for the Allan-Herndon-Dudley Syndrome, Frontiers in Endocrinology, Vol. 13, No. 882788
DOI: 10.3389/fendo.2022.882788 -
(2022): State and Parameter Estimation for Retinal Laser Treatment, IEEE Transactions on Control Systems Technology, pp. 1-13
DOI: 10.1109/TCST.2022.3228442
arXiv: 2203.12452 -
(2022): Optimal hormone replacement therapy in hypothyroidism - a model predictive control approach, Frontiers in Endocrinology, 13: 884018
DOI: 10.3389/fendo.2022.884018 -
(2021): Circular Fields and Predictive Multi-Agents for Online Global Trajectory Planning, IEEE Robotics and Automation Letters, 2021, vol. 6, no. 2, pp. 2618-2625
DOI: 10.1109/LRA.2021.3061997 -
(2020): Modeling and parameter identification for real-time temperature controlled retinal laser therapies, at - Automatisierungstechnik, 2020, 68, 953 - 966
DOI: 10.1515/auto-2020-0074 -
(2018): Mathematical modeling of the pituitary-thyroid feedback loop: role of a TSH-T3-shunt and sensitivity analysis, Frontiers in Endocrinology, vol. 9, pp. 91.
DOI: 10.3389/fendo.2018.00091 -
(2018): Neuromuscular characterisation in Cerebral Palsy using hybrid Hill-type models on isometric contractions, Computers in Biology and Medicine, vol. 103, pp. 269-276.
DOI: 10.1016/j.compbiomed.2018.10.027
Selected Projects
-
Temperature controlled retinal laser treatmentLed by: Prof. Dr.-Ing. Matthias MüllerTeam:Year: 2020Funding: Deutsche Forschungsgemeinschaft (DFG) - 430154635Duration: 2020 - 2021
-
Cont4Med - Estimation and control under limited information with application to biomedical systemsLed by: Prof. Dr.-Ing. Matthias MüllerTeam:Year: 2021Funding: This project has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement No 948679).Duration: 2021 - 2025
![]()
![]()
-
Multi-vehicle trajectory planning using MPCLed by: Prof. Dr.-Ing. Matthias MüllerTeam:Year: 2021Funding: Industrial ProjectDuration: 2021 - 2025
-
roboterfabrikLed by: Matthias Müller, Thomas Seel, Torsten LilgeTeam:Year: 2023Funding: Region HannoverDuration: 2023-2025
![roboterfabrik]()
![roboterfabrik]()








