
PRINCIPAL INVESTIGATOR
POSTDOCS
PHD STUDENTS
- Mohammad Alsalti, M.Sc.
- Isabelle Krauss, M.Sc.
- Tobias Wolff, M.Sc.
ORGANISATION AND ADMINISTRATION
This project has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement No 948679).
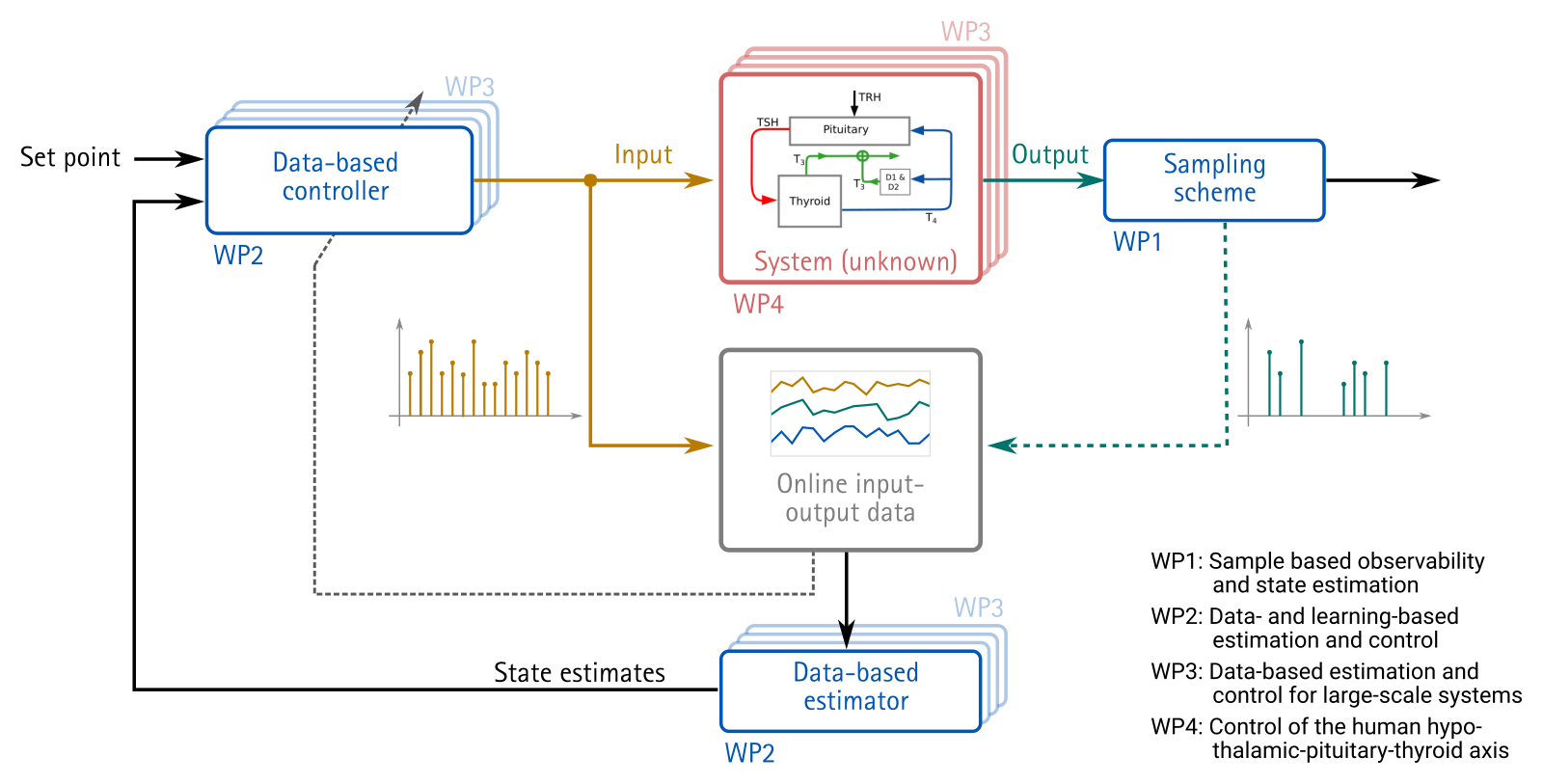
The goal of this project is to develop estimation and control strategies for dynamical systems where only a very limited amount of information is available. This information includes current measurements of the system as well as a mathematical model. The main motivation for considering these problems are biomedical applications, where such a small amount of available information is often inherent. Examples include hormone concentration measurements when considering thyroidal diseases (which are typically only taken every several days/weeks) or monitoring the size of a tumour. Estimating the current state of the system and devising appropriate control actions (e.g., therapy or medication in the biomedical examples) is very challenging in such applications. Achieving these objectives requires the development of novel methods and tools. Within this project, particular focus lies on the following aspects.
First, we study under which conditions is it possible to reconstruct the full internal system information using only few output measurements. Sampling strategies and suitable nonlinear state estimators are derived.
Second, state estimation and control strategies are developed for situations with only partial or no knowledge of a mathematical model of the system in question. This necessitates the design of so called data- and learning-based methods, for which desired guarantees can be given, even in case of few measurements.
Third, the developed tools are extended to large-scale systems, where estimation and control has to be achieved in a distributed fashion.
The results that have been obtained within this project
Letzte Änderung: 25.02.26








